被动增强学习 Passive reinforcement learning
被动增强学习 Passive reinforcement learning
Sheldon ZhengPassive reinforcement learning 被动增强学习
前提:
- 环境有限,完全可观测,就是说所有的规则都掌握,在环境里所有动作所带来的作用都能够被识别。
- 对于agent而言,有一个固定的动作执行策略\(\pi(s)\),即在某种环境状态下执行某种动作
- agent 的目标是学习贴现效用函数\(U^\pi(s)\)(discounted utility function) ,这里的\(s\)指的是状态,\(\pi\)是agent的执行策略
贴现效用函数\(U^\pi(s)\)(discounted utility function) :从初始状态s开始执行策略\(\pi\) 的奖励之和的期望值
4x3 世界模型
使用一个4X3世界的Typical trials 做解释
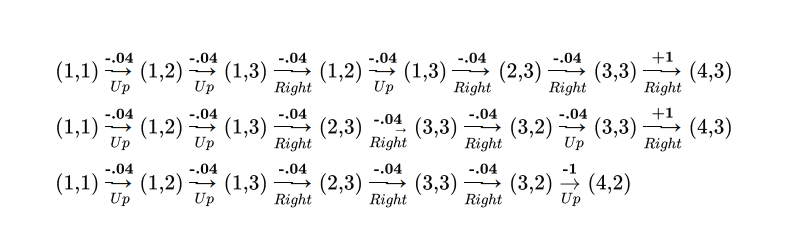
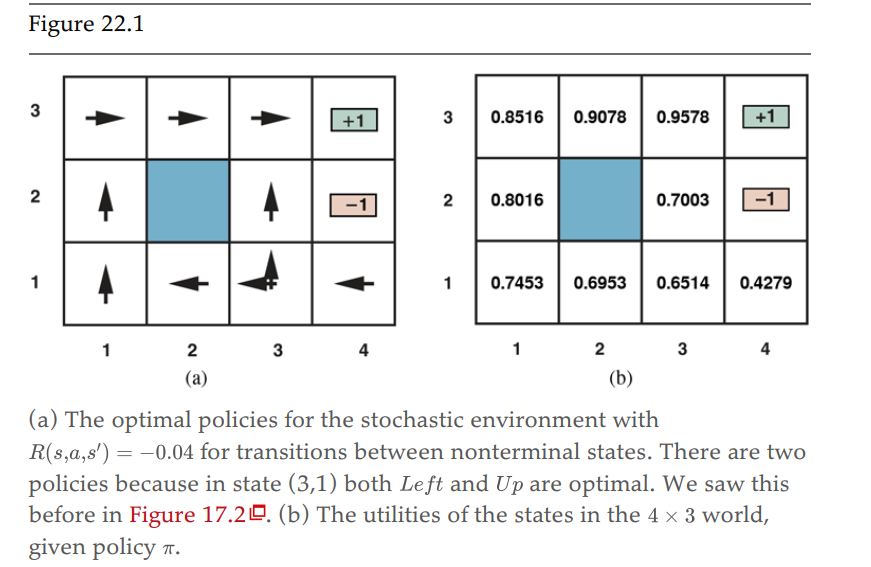

最上面3行是3个trails,即从(1,1)走到terminal states的三组走法,概率转换模型为图b所示,这是一个MDP问题,即有概率转换模型、reward、以及状态效用值。
简而言之,被动增强学习是指在某个可被观测的环境中,agent由初始状态\(s\)按照策略\(\pi\)学习效用函数\(U^\pi(s)\)的过程。
\[ U^{\pi}(s)=E\left[\sum_{t=0}^{\infty} \gamma^{t} R\left(S_{t}, \pi\left(S_{t}\right), S_{t+1}\right)\right] \]
公式中$\gamma^{t}$是在每一时刻$t$时的discount factor,$R\left(S_{t}, \pi\left(S_{t}\right), S_{t+1}\right)$是在状态$S_t$时进行动作$\pi(S_{t})$并得到状态$S_{t+1}$的奖励。Direct Utility estimation
\[ U_{i}(s)=\sum_{s^{\prime}} P\left(s^{\prime} \mid s, \pi_{i}(s)\right)\left[R\left(s, \pi_{i}(s), s^{\prime}\right)+\gamma U_{i}\left(s^{\prime}\right)\right] \]
直接效用值估算是通过运行很多次trail,实现对状态效用值的直接估算。这样就相当于把增强学习变成了标准的有监督学习,但是显而易见,这样的缺点是需要运行很多次trials,本质上还是通过统计的方式把状态空间遍历,通过reward反馈和概率转换模型计算得出状态的效用值。而且,这种方法有一个很大的缺点是其忽略了连续状态之间的关系。实际过程中,一个状态的效用值是由reward和下一个状态的期望效用值共同决定的,而这种直接计算效用值的方法是遵循bellman公式,通过概率转换模型和reward在状态空间中搜索状态效用值,并不能让agent实质地学习。在非常大的状态空间中这种方法会收敛的非常缓慢。
Passive ADP adptive dynamic programming algorithm
ADP使用dynamic programming的方法解决MDP问题
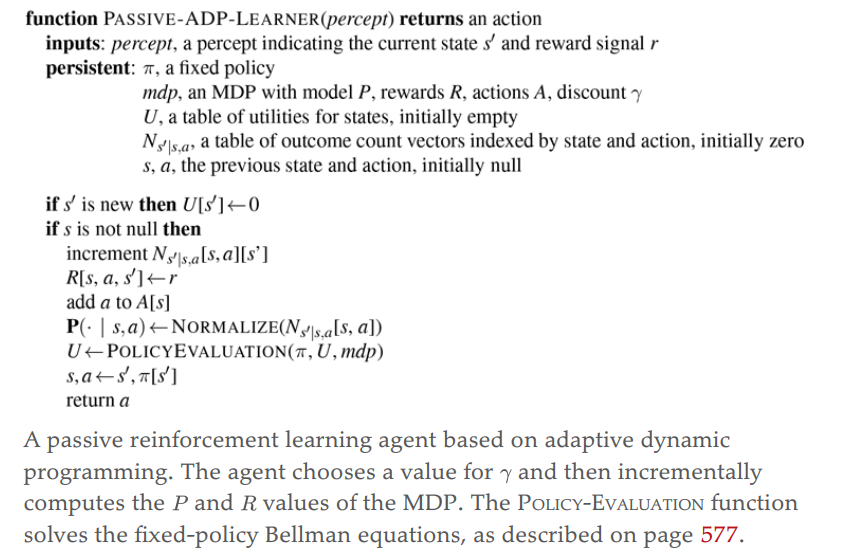
Passive ADP 使用bellman更新函数更新效用值
\[ U_{i}(s)=\sum_{s^{\prime}} P\left(s^{\prime} \mid s, \pi_{i}(s)\right)\left[R\left(s, \pi_{i}(s), s^{\prime}\right)+\gamma U_{i}\left(s^{\prime}\right)\right] \]
ADP 的使用条件是策略\(\pi\)是固定的,即到了某一个状态会做某个固定的动作,不固定的是转换模型P,passive ADP是通过增加trial的次数来不断修正transion model P,
Policy iteration algorithm

其中unchanged 是一个退出循环flag,一直到unchanged为true的时候退出repeat循环,该算法使用Q值作为状态值
policy iteration就是从一个初始策略\(\pi_0(s)\)开始,不断地对策略进行评估和迭代改进,一直到产生的所有的状态的状态值都不再改变,此处\(\pi_{x}\)的下标表示执行次数,如果换做是方格游戏的话则需要从某个状态开始,对所有状态都迭代多次后效用值才能够收敛。
总的来说分两步:
- Policy evaluation: 策略评估,将使用动作\(\pi_i\) 的状态值\(U^{\pi_i}\)当成\(U_i\),即\(U_i = U^{\pi_i}\),其中\(\pi_i\)是在状态\(i\)上要被执行的动作策略(即计算一次所有状态在策略\(\pi_i\)下的下一步的状态值并当作当前状态的状态值)
- Policy improvement: 计算一个新的,基于策略\(\pi_{i+1}\) 的MEU最大期望状态值,即基于\(U_i\)提前计算下一步所有状态的状态值
Passive TD learning algorithm
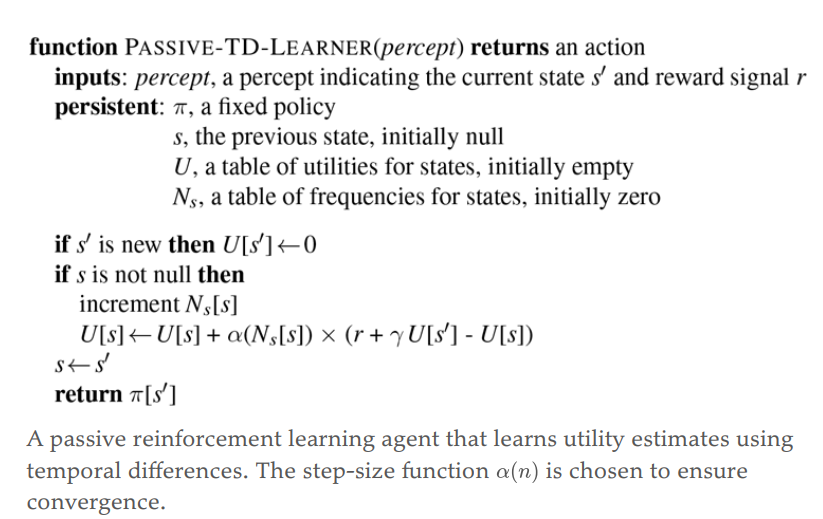
TD 效用值更新函数
\[ U^{\pi}(s) \leftarrow U^{\pi}(s)+\alpha\left[R\left(s, \pi(s), s^{\prime}\right)+\gamma U^{\pi}\left(s^{\prime}\right)-U^{\pi}(s)\right] \]
- \(\alpha\)是学习因子
- \(s'\)是观察到的下一状态,因此\(U^\pi(s')\)是对下一状态的估算效用值
- TD 更新函数和19章的权值更新有异曲同工之妙 \(w_{i} \leftarrow w_{i} + \alpha \sum_{j}\left(y_{j}-h_{\mathbf{w}}\left(\mathbf{x}_ {j}\right)\right) \times x_{j, i}\)
Passive TD 和Passive ADP的区别:
- ADP是基于转换模型来更新的,而且在状态更新中不断修正transition modal,而TD是不基于概率转换模型来进行效用值更新,TD是由环境直接提供连续状态间的联系。
- TD 相比于ADP更加简单,对于每一次单独的观察采样消耗的算力更小,变化性更强,但总体收敛的也较慢
- TD 和 ADP都进行对本地估算的效用值的不断调整,使估算值能够更加能够和其后续状态保持一致性,但TD的目标是和下一个状态保持一致,而ADP则是和后续所有的状态保持一致性。