Flocking for Multi-Agent Dynamic Systems: Algorithms and Theory
Flocking for Multi-Agent Dynamic Systems: Algorithms and Theory
Sheldon ZhengFlocking for Multi-Agent Dynamic Systems: Algorithms and Theory
In 1986, Reynolds introduced three heuristic rules that led to creation of the first computer animation of flocking [5]. Here, are the three flocking rules of Reynolds
- Flock Centering: attempt to stay close to nearby flock mates; 和邻居接近
- Collision Avoidance: avoid collisions with nearby flock mates; 不和邻居碰撞
- Velocity Matching: attempt to match velocity with nearby flock mates 和邻居保持一致的速度
基本问题:
- How do we design scalable flocking algorithms and guarantee their convergence? 如何保持可扩展性而且队形收敛
- What are the stability analysis problems related to flocking? 稳定性分析因素
- What types of order exist in flocks? 集群中的秩序有哪些
- How do flocks perform split/rejoin maneuvers or passthrough narrow spaces? 集群如何变形、分割、以及重聚以飞跃障碍或穿越狭窄空间
- How do flocks migrate? 集群如何迁移
- What constitutes flocking? 集群包含什么
知识点汇总
- The graph \(G\) is said to be undirected if \((i, j) \in \mathcal{E} \Longleftrightarrow(j, i) \in \mathcal{E}\) The quantities \(|\mathcal{V}|\) and \(|\mathcal{E}|\)are, respectively, called order and size of the graph.
- For networked dynamic systems,\(|\mathcal{E}|\) is called communication complexity of the system.
- Let \(q_{i} \in \mathbb{R}^{m}\) denote the position of node \(i\) for all \(i \in \mathcal{V}\). The vector \(q=\operatorname{col}\left(q_ {1}, \ldots, q_ {n}\right) \in Q=\mathbb{R}^{m n}\) is called the configuration of all nodes of the graph.
创新性
有如下创新性: 1. 提出了新的距离函数\(\sigma-Norms\),原因是2范数距离存在不可微分的零点,作者提出的该距离可以定义非负映射从\(\mathbb{R^m} \to \mathbb{R}_ {\geqslant0}\) ,即从\(m\)维映射到了1维。
\[ \|z\|_ {\sigma}=\frac{1}{\epsilon}\left[\sqrt{1+\epsilon\|z\|^{2}}-1\right] \]
其中:\(\epsilon > 0\), 其微分项\(\sigma_{\epsilon}(z)=\nabla\|z\|_ {\sigma}\)为
\[ \sigma_ {\epsilon}(z)=\frac{z}{\sqrt{1+\epsilon\|z\|^{2}}}=\frac{z}{1+\epsilon\|z\|_ {\sigma}} \]
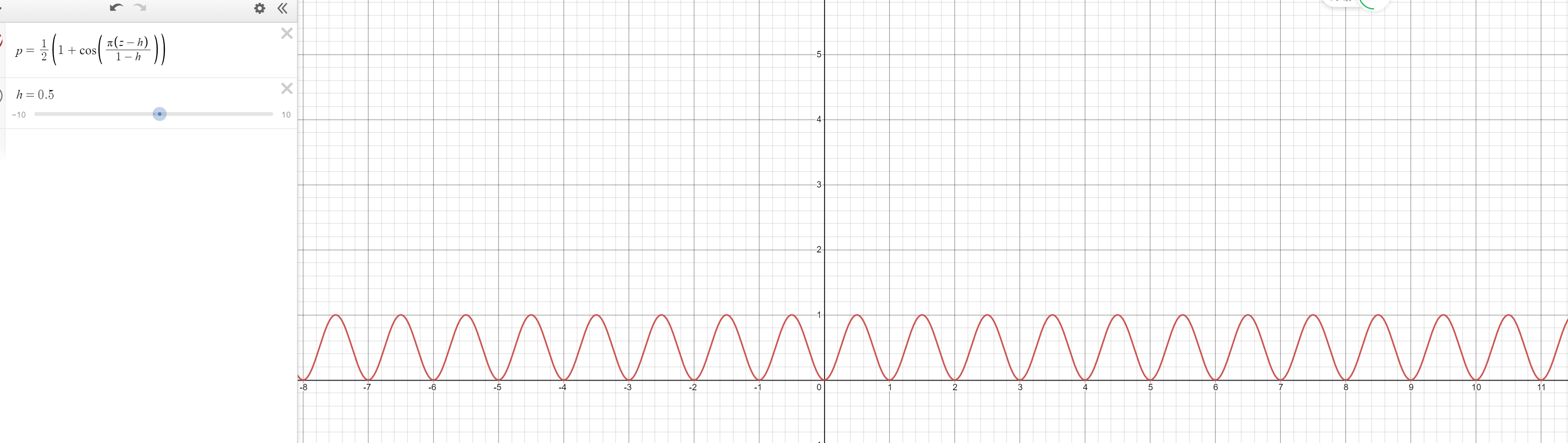
2. 使用bump function来建立smooth potential functions,避免折点且具有有限cut-off:
$$
$$
_ {h}(z)= \[\begin{cases}1, & z \in[0, h) \\ \frac{1}{2}\left[1+\cos \left(\pi \frac{(z-h)}{(1-h)}\right)\right], & z \in[h, 1] \\ 0, & \text { otherwise }\end{cases}\]$$
$$
其中,\(h\in(0,1)\) ,在\(z\in[1,\infty)\) 时, \(|\rho^`_ {h}(z)|\) 是均匀分布在在Z上的。
也因为平滑的特性,继而定义平滑的空间邻接矩阵\(A(q)\):
\[ a_ {i j}(q)=\rho_ {h}\left(\left\|q_ {j}-q_ {i}\right\|_ {\sigma} / r_ {\alpha}\right) \in[0,1], \quad j \neq i \]
其中\(r_{\alpha} = ||r_ {\sigma}||\),对于所有的q和 i,\(a_ {ii}(q)=0\)
控制器模型:
\[ u_ {i}=f_ {i}^{g}+f_ {i}^{d}+f_ {i}^{\gamma} \]
\(f_{i}^{g}=-\nabla_ {q_ {i}} V(q)\)是微分项,代表对势能的微分,形成内部斥力
\(f^d_i\)是速度共识,代表形成共同的速度
\(f^{\gamma}_i\)是对群体目标的反馈
三种算法:
$(, ) $ 控制器
这种控制器只为形成\(\alpha -lattice\),即形成集群晶格,但是没有统一的目标和避障约束,所以容易分散,破碎成大小不同的若干个集群。
Algorithm 1: \(u_{i}=u_ {i}^{\alpha}\)
\[ u_ {i}^{\alpha}=\underbrace{\sum_ {j \in N_ {i}} \phi_ {\alpha}\left(\left\|q_ {j}-q_ {i}\right\|_ {\sigma}\right) \mathbf{n}_ {i j}}_ {\text {gradient-based term }}+\underbrace{\sum_ {j \in N_ {i}} a_ {i j}(q)\left(p_ {j}-p_ {i}\right)}_ {\text {consensus term }} \\ \mathbf{n}_ {i j}=\sigma_ {\epsilon}\left(q_ {j}-q_ {i}\right)=\left(q_ {j}-q_ {i} / \sqrt{1+\epsilon\left\|q_ {j}-q_ {i}\right\|^{2}}\right) \]
带群体目标的控制器
Algorithm 2: \(u_{i}=u_ {i}^{\alpha}+u_ {i}^{\gamma}\), or
\[ \begin{array}{r} u_ {i}=\sum_ {j \in N_ {i}} \phi_ {\alpha}\left(\left\|q_ {j}-q_ {i}\right\|_ {\sigma}\right) \mathbf{n}_ {i j}+\sum_ {j \in N_ {i}} a_ {i j}(q)\left(p_ {j}-p_ {i}\right) \\ +f_ {i}^{\gamma}\left(q_ {i}, p_ {i}, q_ {r}, p_ {r}\right) \end{array} \]
\[ \begin{aligned} u_ {i}^{\gamma} &:=f_ {i}^{\gamma}\left(q_ {i}, p_ {i}, q_ {r}, p_ {r}\right) \\ &=-c_ {1}\left(q_ {i}-q_ {r}\right)-c_ {2}\left(p_ {i}-p_ {r}\right) \end{aligned} \]
\[ \left(q_ {r}, p_ {r}\right) \in \mathbb{R}^{m} \times \mathbb{R}^{m} \text { is the state of a } \gamma \text {-agent. } \]
对于一个动态的\(\gamma-\text{agent}\)来说,可以有下列形式的控制器:
\[ \begin{array}{l} \dot{q}_ {r}=p_ {r} \\ \dot{p}_ {r}=f_ {r}\left(q_ {r}, p_ {r}\right) \end{array}. \]
如果\(\dot{p}_ {r}=0\),则说明加速度为0,即集群将以一个固定的速度运动至固定目标点
带避障的控制器
\[ \begin{aligned} u_ {i}^{\alpha}=& c_ {1}^{\alpha} \sum_ {j \in N_ {i}^{\alpha}} \phi_ {\alpha}\left(\left\|q_ {j}-q_ {i}\right\|_ {\sigma}\right) \mathbf{n}_ {i, j} \\ &+c_ {2}^{\alpha} \sum_ {j \in N_ {i}^{\alpha}} a_ {i j}(q)\left(p_ {j}-p_ {i}\right) \\\\ u_ {i}^{\beta}=& c_ {1}^{\beta} \sum_ {k \in N_ {i}^{\beta}} \phi_ {\beta}\left(\left\|\hat{q}_ {i, k}-q_ {i}\right\|_ {\sigma}\right) \hat{\mathbf{n}}_ {i, k} \\ &+c_ {2}^{\beta} \sum_ {j \in N_ {i}^{\beta}} b_ {i, k}(q)\left(\hat{p}_ {i, k}-p_ {i}\right) \\\\ u_ {i}^{\gamma}=&-c_ {1}^{\gamma} \sigma_ {1}\left(q_ {i}-q_ {r}\right)-c_ {2}^{\gamma}\left(p_ {i}-p_ {r}\right) \end{aligned} \]
其中:
\[ \mathbf{n}_ {i j}=\frac{q_ {j}-q_ {i}}{\sqrt{1+\epsilon\left\|q_ {j}-q_ {i}\right\|^{2}}} \quad \hat{\mathbf{n}}_ {i, k}=\frac{\hat{q}_ {i, k}-q_ {i}}{\sqrt{1+\epsilon\left\|\hat{q}_ {i, k}-q_ {i}\right\|^{2}}} \]
这种控制器的难点是在于获取\(\gamma \text{-agent}\)的位置信息,对于圆型二维障碍物而言,可以有如下定论:
- 对于一个拥有超平面边界且单位正交向量为 \(\mathbf{a}_{k}\)的障碍物, 并且该障碍物有点穿过位置 \(y_ {k}\), 则相对应的 \(\beta\)-agent 可以被确定为
\[ \hat{q}_ {i, k}=P q_ {i}+(I-P) y_ {k} \quad \hat{p}_ {i, k}=P p_ {i} \]
\(P=I-\mathbf{a}_{k} \mathbf{a}_ {k}^{T}\) 是映射矩阵(Projection matrix)
- 对于以 \(R_{k}\)为半径,中心点在 \(y_ {k}\)的障碍物, \(\beta\)-agent的位置速度为:
\[ \hat{q}_ {i, k}=\mu q_ {i}+(1-\mu) y_ {k} \quad \hat{p}_ {i, k}=\mu P p_ {i} \]
where \(\mu=R_{k} /\left\|q_ {i}-y_{k}\right\|, \mathbf{a}_ {k}=\left(q_{i}-y_ {k}\right) /\left\|q_{i}-y_ {k}\right\|\), and \(P=I-\mathbf{a}_{k} \mathbf{a}_ {k}^{T}\)
代码使用的是定论2