协同控制笔记
协同控制笔记
Sheldon Zheng第二章
拉普拉斯矩阵
Jordan form matrix and transformation matrix
特征值
Theorem 2.1 L has rank N-1, i.e.,
如果一个图G的拉普拉斯矩阵的秩是N-1,则
且有以下推论:
- 因为
所有的行自相加等于0,所以有
$$
$$
L c=0
$$
$$
其中
如果
⭐️拉普拉斯矩阵必然含有
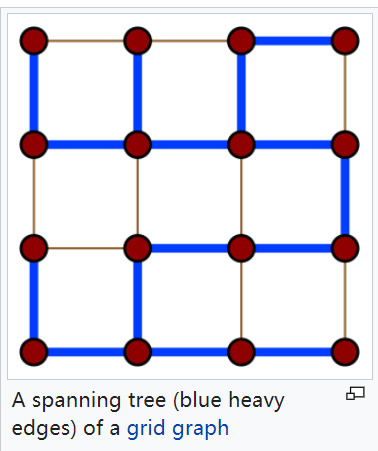
⭐️如果图是强连接图,则图必有spanning tree且其拉普拉斯矩阵的秩为
⭐️如果图有spanning tree,则
⭐️如果图有spanning tree,则该图的拉不拉斯矩阵
有一个无重复的特征值: ,而且其他的特征值都有实数部分大于0 ⭐️所有的无向图都有对称的拉普拉斯矩阵
,所以它们的图拉普拉斯矩阵的特征值都是实数 拉普拉斯正则矩阵:用于两图比较特征值
Geršgorin Circle Criterion
Geršgorin Circle Criterion All eigenvalues of a matrix
矩阵E的所有特征值都在以对角线上元素为圆心,以每一行除掉对角线元素的加和绝对值为半径的圆的与集上面,对于拉普拉斯矩阵来说,每一个对角线元素都是该行其他节点的加和值乘以-1,则除去对角线元素,拥有最大加和绝对值得行是最大入度节点所在行,因为

The
临界稳定性
齐次连续线性时不变系统为临界稳定的充份必要条件是:系统传递函数中每个极点的实部都为非正值,且其中有一个或多个极点实部为零,且均为相异的单根,而其他的极点实部为负值。若所有的极点实部都是负值,系统渐近稳定,若有极点实部为正,则系统不稳定。
若系统是以状态空间来表示,可以推导其若尔当标准型,再分析是否临界稳定:系统临界稳定当且仅当其对于实部为0的若尔当区块为标量。
费德勒特征值 The
Fiedler Eigenvalue
费德勒特征值是是拉普拉斯矩阵的第二特征值
对于无向连接图:
一个图的费德勒特征值大,则在图上的动态系统达到稳态的时间就越短,即图中连接越多,任意两顶点间最远距离越短,则越容易达到稳态
单积分器共识动力学
在图上个节点,考虑节点
其中
对于所有节点则有
于是发现单一积分器的一致性就与图拉普拉斯矩阵有密切关系
于是,在系统平衡态的时候有:
因此全局的steady-state都存在于
如果
其中
定理2.2 初阶系统共识收敛
本地投票协议
Consensus for First-order Systems The local voting protocolguarantees consensus of the single-integrator dynamics if and only if the graph has a spanning tree. Then, all node states come to the same steady-state values
The consensus value is given by (15)
证明:
对于
如果图有旋转树,则除了
取
其中第二项就是系统趋于稳定时得共识值,而第一项则代表了收敛速度,在
对于在图上使用低阶控制器运动的动态系统而言:
- 节点状态收敛到一致的速度快慢大致取决于Fiedler特征值
的大小
所有节点同步到初始态的平均值时第一特征向量即为稳态值
当所有节点都同步到初始状态节点的平均值时,也就是稳态时:
因为在稳态时,$ w^T_1x(0)={i=1}^{N} p {i} x_ {i}(0) = c=c$
即可以得到:
即
因为在无向图中,
所以有:
综上可以得出结论,稳态值为初始状态平均值的初阶系统,其拉普拉斯矩阵的第一特质值
consensus leader
- consensus leader定义为图中spinning tree的根节点
- 所有节点都会向着leader节点状态进行同步
- 拉普拉斯矩阵第一特征值对应的特征向量,其大于零的部分对应的节点就是leader节点
- 一个图中可以有多个leader,但是最后同步状态不知道超哪个leader去,或者是朝着leader的平均值去?
Discrete--time dynamics
对于离散时间的单个节点而言,其运动有如下动力学
分布式本地控制器
closed-loop system
global input
global dynamics
Perron matrix
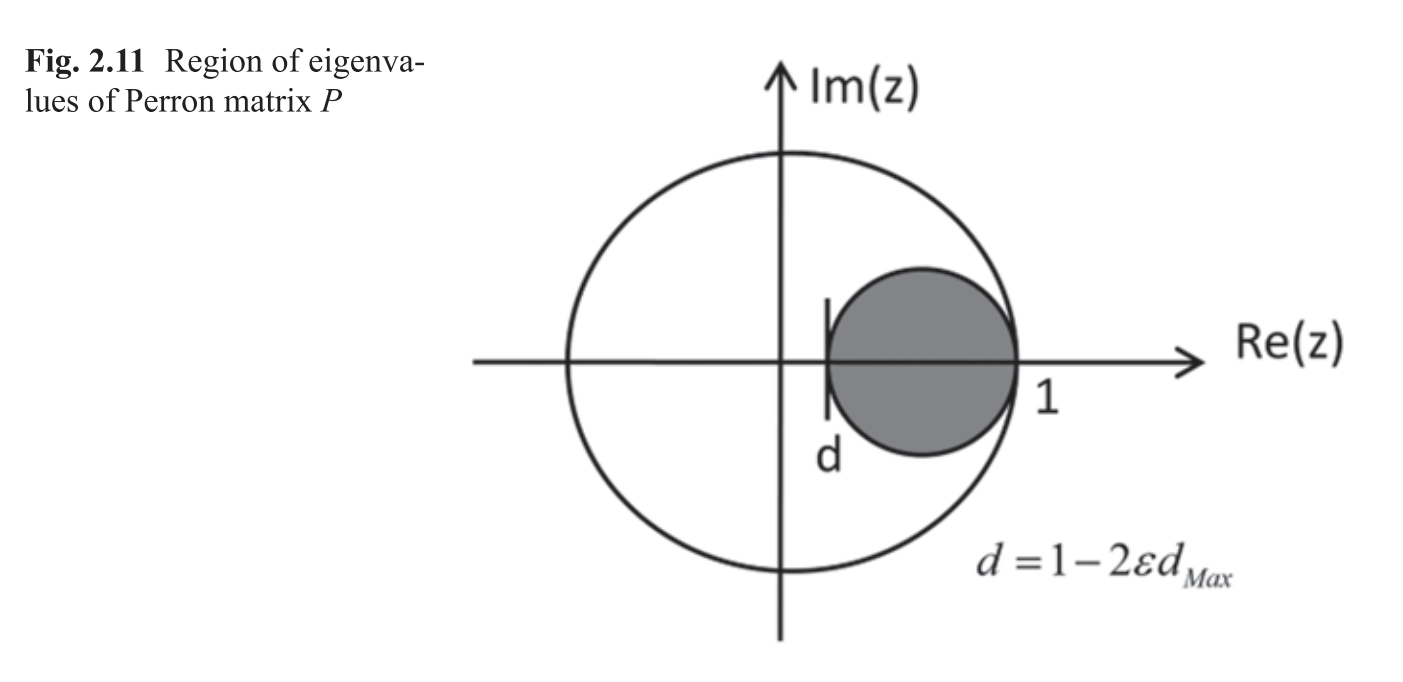
因为拉普拉斯矩阵的row sum是0,所以Perron matrix 的row
sum是1,所以
在稳态的时候,离散系统的稳态状态:
如果系统图有spinning tree,则
也就是对应在
因为有spinning tree,所以公式(19)可用,即:
所以(28)等于:
所以前一个状态等于后一个状态,所有时刻的状态和左特征向量的矩阵乘积都相等,即共识值为一个定值:
本地控制协议
其中
离散时间下的节点动力学:
相应的全局控制:
全局动力学为:
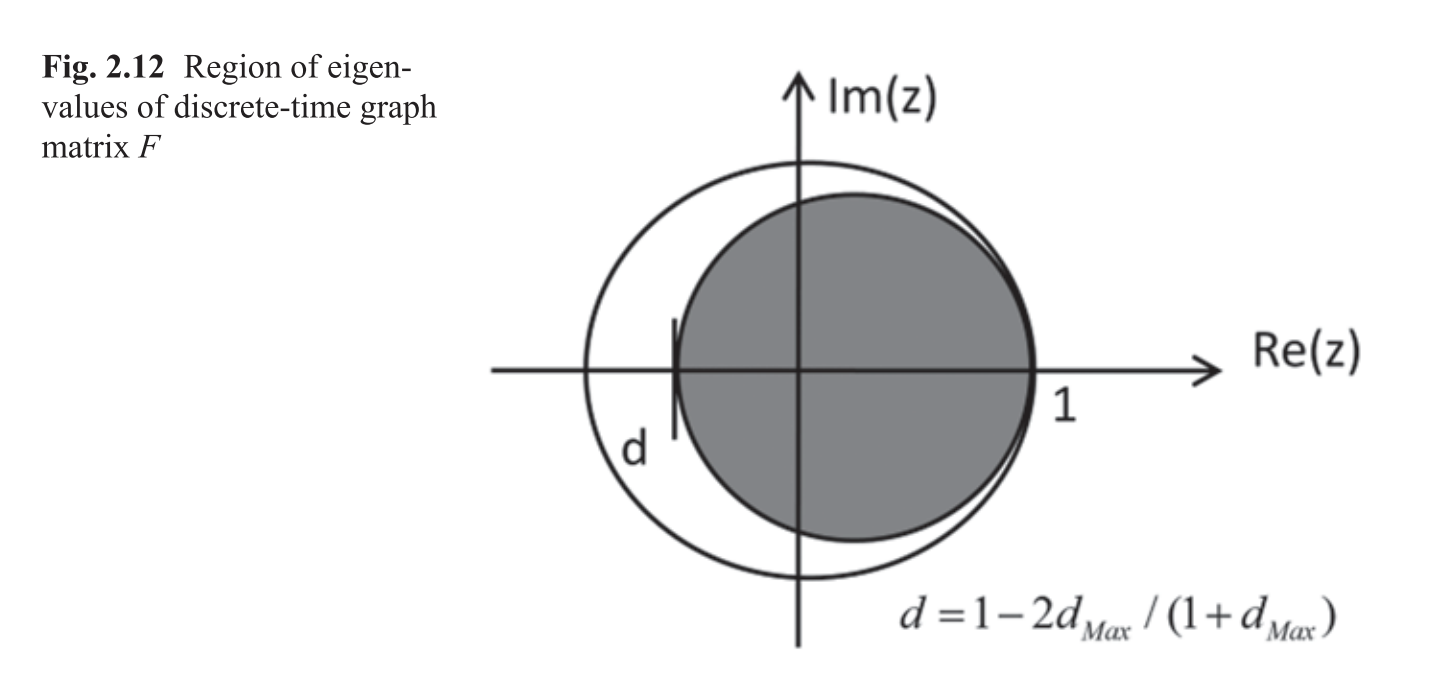
矩阵
对于F矩阵,如果图有spinning tree,则有如下性质:
- F矩阵有简单特征值
- 初
以外其他特征值都在零点圆心单位圆内 - 系统是临界稳定的,状态趋于稳态值
是 的第一特征值 对应的右特征向量 - 所有特征值都在下图中灰色区域
其中左特征向量
和上一个分布式protocol相似,共识值是一个运动常量,即: